MaxBotix無人機超聲波傳感器操作

MaxBotix Inc.傳感器已成功應用于多旋翼無人機中。許多用戶對于超聲波傳感器在多旋翼無人機飛行過程中如何可靠地工作存在疑問,這是一個充滿挑戰性的應用環境。明顯的問題是,超聲波傳感器周圍的氣流紊亂,這是由螺旋槳產生的噪音。
電機所使用的電能(電流安培數)通常共用相同的微控制器,控制飛行和讀取傳感器,因此很可能傳導電噪聲。另外,電子的電流通常是迅速開啟和關閉也可能輻射電噪聲,和常見的對講機如ZigBee XBee等。此外,一些多旋翼無人機存在機架的振動。總之,這些問題是實質性的,只糾正一個問題,而忽視其他問題可能無法提供可靠的操作。
空氣擾動
螺旋槳引起大量的空氣湍流,但它們以可預測的方式進行。應避免將傳感器直接安裝在螺旋槳渦流中。通過將傳感器安裝在遠離螺旋槳的位置,將獲得佳的操作和結果。如果使用傳感器測量到地面的距離,通常安裝傳感器的佳位置是機身下方和機身中心附近。機體是多旋翼無人機支持部件如電機、APM、布線等其他成分。
一個強大的電動無人機的測量表明,這種效應引起的傳感器接收到的信號能量降低,有時超過十倍!這類問題一般是通過使用我們的XL-maxsonar-EZ系列傳感器克服,但通過細心的安裝,一些客戶已經成功使用我們的LV -maxsonar -EZ系列傳感器。
可視化效果。在你的眼睛前面放一個冰塊,然后看著它。當然,你可以看到冰塊,但大部分光線是指向或來自其他地方的。空氣擾動的作用類似于光穿過冰塊的路徑,以不穩定的方式改變聲波的方向和強度。
深圳工采網向您介紹
1.MaxBotix ?USB超聲波傳感器MB1210 XL-MaxSonar-EZ 系列

XL-MaxSonar-EZ 系列USB超聲波傳感器輸出功率高,針對變化的環境(溫度、電壓和聲學及電氣噪音) 具備實時自動標定功能,確保用戶每次采集的讀數都是可靠(空氣中)的數據。
XL-MaxSonar-EZ/AE超聲波傳感器的電壓要求低(3.3~5.5V),能在小而緊湊的外形結構中提供長短距離檢測和測距。
MB1200和 MB1300傳感器能夠檢測相距0cm(1)至765cm(25.1英尺)或1608cm(35英尺)的物體(選擇模塊),并提供20cm(2)至765cm或1608cm(選擇模塊)分辨率為1cm的聲吶測距信息。一般情況下認為相距0cm(1)至20cm(2)的物體的距離信息為 20cm。傳感器的具備的接口輸出形式包含脈寬輸出(MB1200系列)、實時模擬輸出包絡(MB1300系列)、模擬電壓輸出 和串行數字輸出。
(1)無法檢測相距0mm~1mm的物體;(2)對于MB1200/MB1300,MB1210/MB1310,MB1261/MB1361此距離為25cm
2.液位超聲波傳感器 XL-MaxSonar-WR系列 MB7052特征和優點:

雜波抑制在視場內提供大幅度反射的對象的距離信息
實時標定、噪聲抑制及額外的過濾確保距離信息穩定
在存在雜波或無噪聲的環境中能夠檢測到大目標的性能優異
是要求持續精確輸出應用的良好選擇
優越的抗聲學和電氣噪聲能力
MB7092的刷新率為10Hz
MB7052的刷新率為6.6Hz
螺旋槳噪聲
螺旋槳聲學噪聲與空氣湍流非常相似,除了改變傳感器實際探測到的能量外,它還會增加額外的外部聲波能量給傳感器。大部分的噪音來自于螺旋槳葉尖渦流區。
對一種強大的電動多軸飛行器的測量顯示,這種影響可以導致敏感的傳感器,如EZ0、EZ1,有時甚至是EZ2傳感器和xl-maxsonar-ez,會錯誤的檢測到這一噪音。這種檢測可以導致比正常情況下更低的范圍。經過再一次仔細的安裝,許多用戶發現我們的任何一個lv-maxsonar-ez或xl-maxsonar-ez傳感器都可以很好地運行。
我們建議用戶避免在傳感器直接路徑到任何螺旋槳的地方安裝傳感器。如果你能看到傳感器從螺旋槳上經過,傳感器就會聽到這個聲音。好的安裝泡沫橡膠可以用來阻擋這條路徑,用戶可以在飛行電子設備下安裝傳感器,也可以使用兩者的組合。
可視化效果。在你的眼睛旁邊放一個手電筒,但是直接指向你的眼睛(請不要這樣做,但是試著在你的腦海中想象這個效果),然后在一個遙遠的場景旁邊看著它。你可能會發現一些功能,但是大部分功能在你的視覺上都是模糊的。螺旋槳的噪音與空氣路徑相似,以不規則的方式增加了額外的聲學能量。
接地和電源
無人機的電源和接地是控制系統和電機共用。超聲波傳感器的電源通常是來自于讀取它的系統,例如控制系統。這些物品的配線會對系統中的電子器件產生明顯的影響。如果控制系統的電源或接地都是噪聲,那么控制系統上的模擬數字轉換器(ADC)就會被嚴重地干擾。這種情況下,即使傳感器可能具有無噪聲輸出,也能使傳感器讀取許多ADC計數的“噪聲”。
“Star”電源和接地系統通常是好的。“Star”是使用由電源和地面組成的單獨的扭曲對來設置的,每一個使用電源的器件都有它自己的扭曲對,從電源,例如電池包,到電源輸入。在這個系統的設置中,每個項目都有自己的電力,并返回到源。如果一個元件有一個高電流的吸引,例如一個馬達,只有那個部件會使它的電壓降低。這種電壓降低是由于線路的電阻。具有高電流吸引力的項目,以及對電源和地面的相關變化,都與其他所有被供電的項目相隔離。很多時候,只有地面連接在一個Star上。如果只有地面連接在一個Star上,那么從高電流項目中獲得的電壓下降可能會流到系統中其他較低的電流項目中。從系統功率到每個負載的單獨的雙絞對都是不錯的,并且非常推薦。對于Star線圖,請參閱右側的圖片。
一個菊花鏈通常不是用來分配電量的推薦方法。在一個菊花鏈系統中,所有的能量和地面都從一個項目到下一個項目,使用少的線路。鏈上的所有項都將相互作用。在這個系統中,不常用的是一對扭曲的電線,而且對于每一件物品所使用的功率或電流的數量也不太關心。有時,這種連接方式可以將具有相似電流的組件分組,但是需要考慮連接組件之間的交互。敏感的物品,如控制器和傳感器,應該用“Star”接線方法連接起來。關于一個菊花鏈的樣子,請參考圖2。
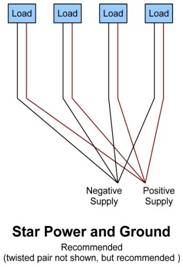
圖1

圖2
進行電噪聲
當四軸飛行器被驅動時,產生了電子噪音。許多安培電流被用來驅動馬達,并將在地面上的電壓水平和四軸飛行器上的電力線路上的電壓下降。此外,Zigbee、Zigbee、MaxStream、NEXbee等無線電設備在四軸飛行器上傳輸的信號可以在傳輸過程中產生電壓。這種對超聲波傳感器供電的噪音可能會導致傳感器操作不當。一個簡單的電源過濾器可以緩解大部分的問題。像MB7961電源濾波器這樣的RC濾波裝置有100個,10歐姆和100歐姆的電阻,當使用的時候,將會消除大部分的電子噪音,使我們的傳感器無法到達我們的傳感器。
多旋翼無人機已經用簡單的濾波器解決了大部分錯誤的距離。下面的圖表顯示了之前和之后的范圍讀數的圖片,而無需電源過濾器。

上圖顯示的信號來自于多旋翼無人機的傳感器,該傳感器具有不穩定的電源。
?
上面的圖顯示了在電力濾波器已被應用到一個不穩定的電源的多旋翼無人機的傳感器
輻射電噪音
用于驅動四旋翼飛行器上的電動馬達的高開關電流產生大量的輻射電噪音。另外,從四軸飛行器發射的無線電將會產生輻射電能。這種輻射能對四軸飛行器上的其他系統和傳感器起到干擾(噪音)的作用。
如果我們使用的是MB7961電源濾波器,輻射電噪音一般不會引起我們的超聲波測距傳感器不正確的讀取問題。當用戶正確安裝電源濾波器并使用我們的一個數字接口,如I2C,串行,或脈沖寬度輸出傳感器的距離讀數通常不會被輻射的電子噪聲損壞。
我們的傳感器的模擬電壓輸出的用戶在使用輻射電子噪聲的環境中使用傳感器輸出時可能會遇到問題,除非使用一種屏蔽的配線裝置。我們的屏蔽電纜,MB7954可以很好地工作。電纜上的屏蔽必須在微控制器端正確地接地。如果屏蔽線在微控制器上沒有連接到地面上,那么屏蔽將不會有什么作用。相鄰(-)地銷釘在負(或地)的旁邊,工作得很好。
對高功率四軸飛行器的測量顯示,模擬電壓輸出的典型噪音從10mV峰到峰值,在不使用屏蔽電纜的情況下,從10mV峰值上升到峰值。當使用了屏蔽線,馬達完全功率時,噪音幾乎從10mV增加到12mV。即使使用了屏蔽電纜,屏蔽線也被保留了(不連接),噪音從10mV峰值上升到峰值,達到240mV峰值。重要的是用戶只能在微控制器一側接地屏蔽!
框架振動
除了聲音噪聲和輻射的電子噪聲外,框架振動也是我們傳感器的一個可能的噪源。這可以被認為是接觸聲噪音,從框架的能量傳輸到傳感器。在我們的測試中,在我們測試的強大的四軸飛行器上沒有觀察到來自框架振動的噪音。這并不能完全消除框架振動,作為其他多因素的可能來源。橡膠墊圈,泡沫膠帶,或任何其他消除框架振動作為噪聲源的方法都是推薦的。
傳感器故障診斷
|
噪聲源 |
導致 |
解決方案 |
評價 |
|
空氣擾動 |
螺旋槳清洗和周圍的傳感器 |
安裝傳感器盡可能遠離螺旋槳清洗。典型的安裝位置是將傳感器安裝在靠近中心的空氣框架底部。 |
應該經常考慮非常常見的問題和傳感器安裝位置。 |
|
螺旋槳噪聲 |
螺旋槳噪聲傳感器 |
安裝傳感器盡可能遠離螺旋槳清洗。典型的位置是將傳感器安裝在靠近中心的空氣框架底部。 |
應該考慮非常或常見的問題和傳感器安裝位置。 |
|
接地和電源 |
接地和電源接線沒有正確連接。 |
把Star電源中的所有部件連接起來 |
應始終考慮Star線布局 |
|
引導電噪聲 |
從同一電氣系統連接的其他物品傳導的電信號。 |
使用電源濾波器 |
大多數用戶建議使用普通電源和電源濾波器。 |
|
輻射噪聲 |
同一電氣系統附近其他設備的輻射噪聲 |
使用屏蔽電纜 |
屏蔽電纜可以提高傳感器性能。如果使用傳感器輸出的模擬電壓范圍,則強烈建議使用屏蔽電纜。 |
|
框架振動 |
空氣框架具有機械振動,傳遞到傳感器。 |
利用隔振材料安裝傳感器。 |
使用橡膠墊圈或泡沫。 |
傳感器推薦
深圳工采網向你推薦MaxBotix可用于無人機的超聲波傳感:MB1210。MB7052
轉載請注明出處:傳感器應用_儀表儀器應用_電子元器件產品 – 工采資訊 http://www.iohhome.com/3964.html



