近部分大型安防企業的會議攝像機以及智能攝像機的云臺的X、Y軸驅動或Focus、Zoom、P-iris的驅動都使用了工采網代理的國產品牌Ruimeng?TECHNOLOGY推出的MS41949低壓步進電機驅動芯片。本文將探究步進馬達驅動芯片 - MS41949低壓步進電機驅動使用性能與使用方法。
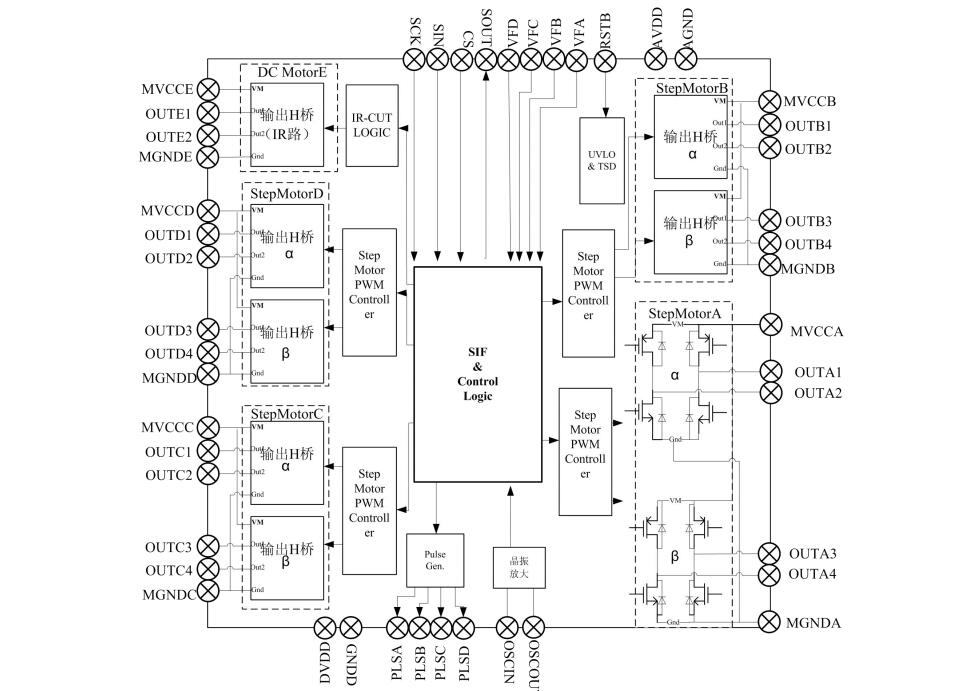
圖1是MS41949步進電機驅動的內部框圖,從規格書上看,MS41949工作電壓范圍3V~5.5V,大輸出電流500mA,輸出電流大小可通過改變占空比來控制。芯片內部已經完成細分、轉速、所走步數,設置完之后,從VDFZ管腳輸入固定頻率脈沖,電機就可以連續轉動了。這個過程不需要MCU過多地參與。
芯片初始化流程圖,設置如下:
(1)首先把20H寄存器設置為0x1e03,即把PWMMODE設為0x1e,PWMRES設為0,那么根據PWM計算表達式,此時PWM頻率為27MHz/(0x1e×2^3)=112.5KHz,DT1延時=3×303us,延時約1ms。
(2)22H寄存器設置為0x0002,即PHMODAB[5:0]=0,DT2A=2;就是設置驅動器A的12相與34相的相位相差90°,DT2A=2×303us=606us延時
(3)23H寄存器設置為0x7878,即PPWA[7:0]、PPWB[7:0]都設置為0x78,調整輸出負載電流,占空比輸出=PPWX/(PWMMODE×8)=120/(30×8)=50%
(4)24H寄存器配置為0x0410,即MICR0AB[1:0] = 0,設為256細分,ENDISAB=1,使能AB驅動器輸出,PSUMAB=0x10,即設置每個VF上升沿到來,步進電機走0x10/8=2步距角。
(5)25H寄存器設置為0x1AB5,即INTCTAB[15:0]=0x1AB5,該值是設定步進電機每個微步的運行時間,按照此值,每個正弦波運行時間為:0x1AB5×111ns*256=194.3ms。而一個正弦波周期走4個步距角,比如電機步距角為1.8°,那么轉速為1.8°×4/194.3ms=37.1°/s,以上公式都是基于規格書所給的,經過實測,非常精確。
(6)以上5個步驟是設定A電機的,到此,步進電機已經能夠正常工作,B/C/D電機的設置也可以參考此值設置,如果設置B電機,那么應該要按照以下設置:27H設為0x0002,28H設為0x7878,29H設為0x0410,2AH設為0x1AB5
MS419XX的SPI屬于高速4線SPI,高SPI時鐘可達5MHz,配置完以上寄存器之后,連續給VF脈沖,電機就能夠連續轉動了;給一個VF脈沖,電機只運行所設定的步數,然后就會停止,帶電流保持力矩,直到下一個VF脈沖到來。
轉載請注明出處:傳感器應用_儀表儀器應用_電子元器件產品 – 工采資訊 http://www.iohhome.com/18312.html




請問A,B電機PPWxx為什么設置一樣?按照8拍的話占空比不應該是A+:H,A-:L,B+:L,B-:H這樣設置嗎?是我理解錯了嗎?
方便留下聯系號碼么?我會安排技術人員跟您解答問題
180 2531 1976